Sur Mars, c’est le gnomon qui a été choisi pour déterminer la direction du nord géographique ou orienter les instruments scientifiques des missions martiennes.

1. Photo du sommet du sismomètre SEIS prise le 1er janvier 2019. L’ombre du gnomon sur la mire est bien visible. (Nasa/JPL)
Si l’on considère que la détermination de l’altitude des montagnes lunaires par Galilée en 1610 préfigure l’application de la science des ombres à un autre astre que la Terre1, il faut, semble-t-il, attendre la fin des années 1960 et le début des années 1970 avec les missions américaines Apollo pour que commence véritablement l’utilisation scientifique du gnomon sur la Lune. Il faudra encore attendre un demi-siècle après cet événement pour que cet instrument soit utilisé sur la planète Mars avec la sonde InSight. Dans les deux cas, le gnomon a été choisi pour déterminer la direction du nord géographique ou pour orienter des instruments scientifiques de mesure, ce qui a impliqué à chaque fois de pouvoir calculer l’azimut du Soleil précisément puisque le principe repose sur l’angle que fait le Soleil (ou sa direction opposée) avec une direction cardinale. La Lune et Mars partagent une même caractéristique : l’absence d’un champ magnétique pour orienter une boussole, laquelle donne la direction du nord magnétique, qui ne coïncide pas forcément avec le nord géographique.
Pour que le sismomètre SEIS déposé par la sonde InSight à la surface de la planète Mars en décembre 2018 puisse être utilisé, il faut connaître son orientation par rapport au Nord géographique martien, lequel est défini, comme sur Terre, par la direction de l’axe de rotation. Il existe plusieurs solutions pour déterminer le nord sur une planète : utiliser une étoile polaire, utiliser l’ombre d’un objet éclairé par le Soleil, utiliser un gyroscope.
L’étoile polaire « nord » de Mars, qui n’est pas très éloignée de Deneb (α Cygni), aurait demandé un système de visée nocturne complexe ; de plus, en raison de la latitude équatoriale d’InSight (près de 4,5° N), l’étoile aurait été trop près de l’horizon. Dans le cas d’InSight, ce sont les deux dernières solutions qui ont été retenues par la Nasa.
Lors de la phase de descente de l’atterrisseur dans l’atmosphère, un gyroscope embarqué a permis de connaître l’orientation de la sonde, mais il était indispensable de la vérifier une fois l’ensemble posé au sol. À cet effet, on avait muni le sommet du sismomètre d’une mire divisée en secteurs angulaires afin de déterminer l’azimut de l’ombre du gnomon, puisque déterminer la direction du nord sur Mars par l’ombre revient à connaître l’azimut du Soleil. Le gnomon était constitué par le crochet de préhension de SEIS, ce qui était loin d’être idéal en raison de sa forme circulaire (fig. 1).
Après une série de tests en décembre 2018, la NASA a fourni 8 images en haute résolution, prises par la caméra située au bout du bras articulé (IDC) d’InSight le 1er janvier 2019. Pour chaque image qui arrivait, on connaissait l’heure de la prise de vue en temps universel coordonné (UTC) ainsi que les coordonnées géographiques du sismomètre (latitude = 4° 30’ 9’’ N, longitude = 135° 37’ 5’’ E). Pour calculer l’azimut et la hauteur du Soleil sur Mars en fonction de l’heure et du lieu, la solution VSOP87 de P. Bretagnon a été choisi. Elle fournit les coordonnées héliocentriques de Mars avec une très haute précision sur un grand intervalle de temps, en l’adaptant à un référentiel local martien prenant en compte les derniers ajustements en ce qui concerne l’obliquité de Mars et la précession-nutation du repère écliptique d’après les constantes issues d’A. Konopliv. Une simulation numérique très précise du gnomon de SEIS a été également mise au point en intégrant une version « allégée » du mouvement du Soleil sur Mars à l’aide du logiciel de raytracing POV-Ray. C’est grâce à ces simulations qu’un entrainement à faire des déterminations de direction du nord sur des images soit dégradées en visibilité, soit en intégrant un problème d’horizontalité du sismomètre a pu avoir lieu (en d’autres termes en lui donnant une inclinaison et une orientation inconnues). Nous avons mis au point une liste des problèmes possibles auxquels nous pourrions être confrontés : erreur sur les coordonnées « d’atterrissage » d’InSight, décalage dans la transmission en UTC des images, inclinaison du sismomètre de quelques degrés, etc. Cette analyse des sources d’erreur potentielles dans la détermination de l’azimut du Soleil nous a permis de choisir des plages horaires optimales pour les prises de vue de l’ombre du gnomon. Le voisinage du passage au méridien s’est avéré être la fenêtre la plus défavorable, même si une image méridienne permettait de valider la direction nord-sud.
Huit images ont été sélectionnées pour déterminer le nord : cela commence par un travail de calage des points de repère sur la mire puis par l’estimation du sommet de l’ombre (fig. 2) ; connaissant la hauteur du gnomon et l’heure de prise de vue en UTC, on a calculé l’azimut et la hauteur du Soleil ; puis on a reporté sur l’image grâce aux secteurs angulaires de la mire la valeur de l’azimut (en vérifiant le bon sens de rotation de l’ombre), en s’assurant de la cohérence de la longueur de l’ombre. Un léger avantage des ombres sur Mars tient au diamètre apparent du Soleil qui était de 0° 22’ début 2019, limitant ainsi l’effet de pénombre.
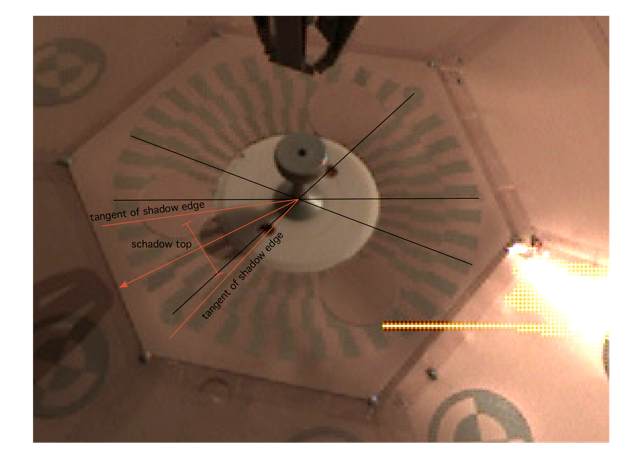
2. Méthode d’estimation de l’azimut du Soleil à partir de l’ombre.
Grâce aux repères du sismomètre, les ingénieurs de l’IPGP et du CNES ont finalement rapporté le nord géographique ainsi déterminé (fig. 3). On a pu vérifier au passage que l’orientation obtenue à l’aide du gnomon, comparée à celle obtenue avec le gyroscope, différait de 2,5°, ce qui finalement est un beau résultat.
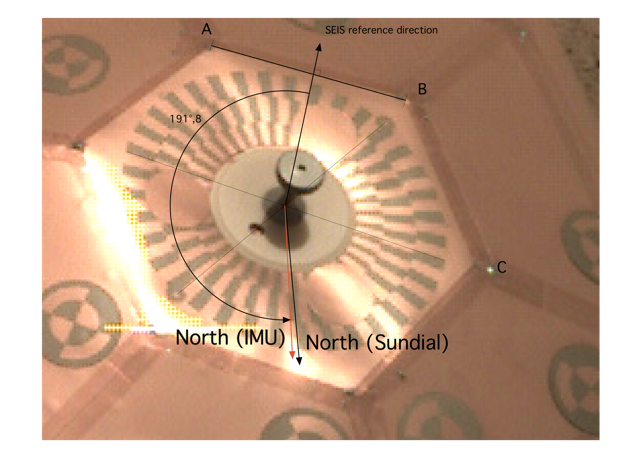
3. Orientation finale du sismomètre par rapport au nord géographique martien.
Précisons pour finir que si les sondes Curiosity et Mars Exploration Rover incluaient un « MarsDial », ceux-ci étaient des appareils artistiques utilisés comme cibles d’étalonnage pour les caméras. Ils n’étaient pas destinés à fournir des mesures astronomiques rigoureuses et le gnomon d’InSight est le premier à ce jour à avoir servi de boussole solaire.
Denis Savoie, Syrte, observatoire de Paris